Lesson 8: RECOGNITION OF ROAD BOUNDARIES, ROAD USERS AND OBSTACLES II: USING A LIDAR
In this lesson, we will explore how LiDAR technology, the Global Positioning System (GPS) sensing unit, and the MATLAB software package contribute to the recognition of road features and obstacles in the context of autonomous vehicles.
- Recognition of Distance from Obstacles Using LiDAR
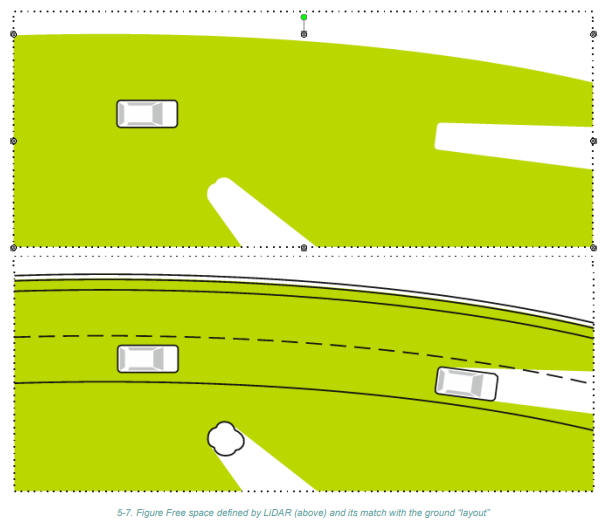
- LiDAR (Light Detection and Ranging) is a crucial technology for identifying obstacles surrounding the vehicle.
- LiDAR devices are often mounted on the vehicle’s roof and can rotate to provide a 360° view of the surroundings.
- LiDAR calculates the distance to obstacles by measuring the time it takes for laser beams to bounce off objects and return to the sensor.
- The ability to precisely measure distances is essential for ensuring the vehicle’s safety and avoiding collisions.
- Using the Global Positioning System Sensing Unit
- The Global Positioning System (GPS) sensing unit is primarily employed to verify the accuracy of the vehicle’s current position information.
- While GPS sensors may not offer high precision for transverse positioning on the road, they are valuable for correcting the vehicle’s longitudinal position.
- GPS can be particularly useful when the LiDAR and camera sensors require fine adjustments to predict upcoming curves accurately.
- Utilizing the MATLAB Software Package for Determining Vehicle Surroundings
- MATLAB, a widely used software platform, provides the Automated Driving Toolbox starting from version R2017a, making it accessible for students and developers.
- This toolbox empowers users to design and implement autonomous vehicle control systems.
- Key features offered by the MATLAB package include:
- Fusion of data from various sensors.
- Visualization and representation of sensor data in a bird’s-eye view.
- Simulation of systems like frontal collision warnings, lane departure prevention, automatic parallel parking, and adaptive cruise control.
- Visual perception using monocular cameras.
- Object identification (both stationary and mobile) based on camera input.
- Signal processing from LiDAR for creating a three-dimensional map of the vehicle’s environment.
- MATLAB’s capabilities make it a powerful tool for developing and testing autonomous vehicle technologies.
Conclusion
- LiDAR, GPS sensing units, and MATLAB software play critical roles in enhancing the recognition of road boundaries, road users, and obstacles for autonomous vehicles.
- LiDAR provides precise distance measurements, ensuring the vehicle can navigate safely.
- GPS offers longitudinal position verification, improving overall accuracy.
- MATLAB’s Automated Driving Toolbox equips students and developers with a comprehensive platform for designing and simulating autonomous vehicle control systems.
- These technologies collectively contribute to the advancement of autonomous driving and its applications in various domains.